High Speed Mobile Robot with Transformable Wheels Adaptive to Various Obstacles
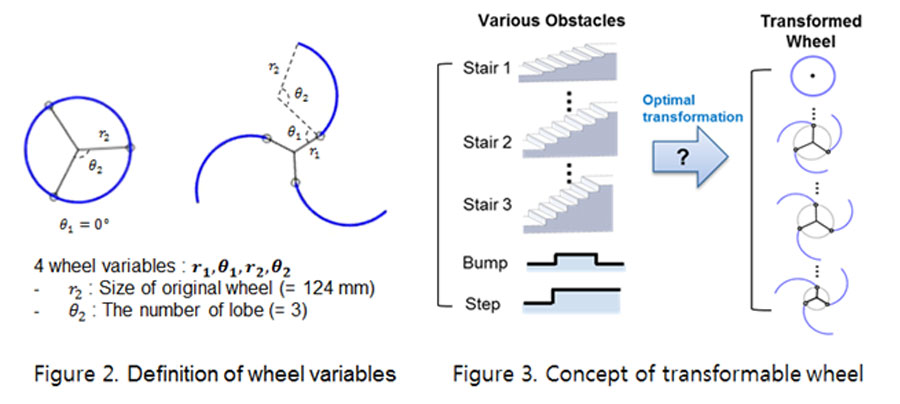
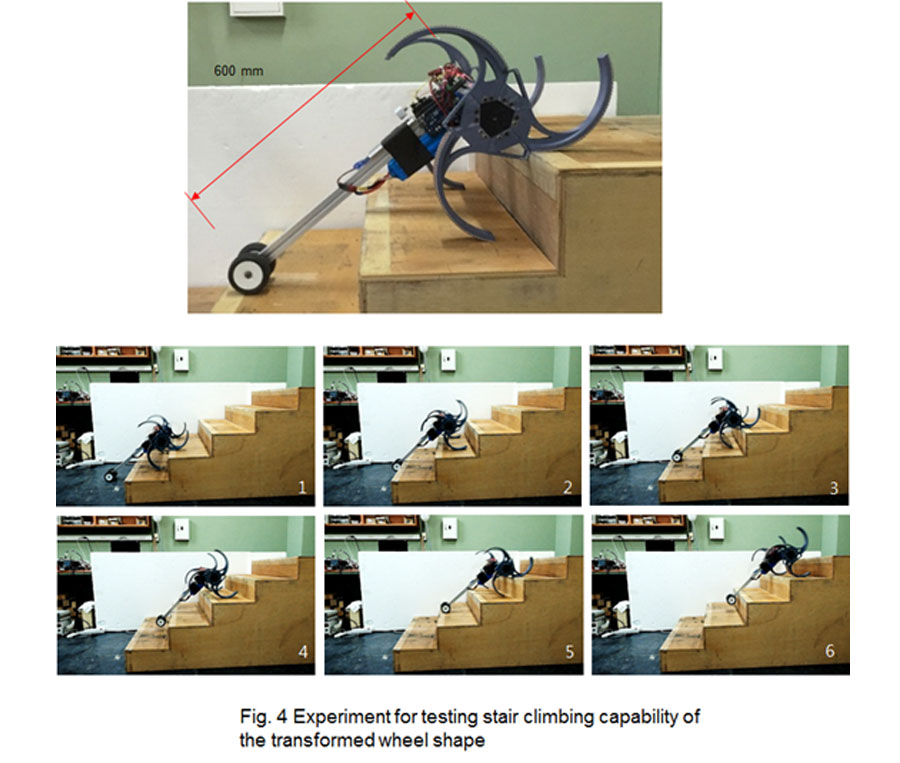
Stair is known as one of the most difficult obstacles for indoor mobile robots. In order for the indoor mobile robots to perform various tasks within human’s living spaces, their capabilities of climbing stairs stably even at the speed of human locomotion (60 m/min) are essential. For an indoor mobile robot of small width, short length and high center of mass (CM), it turns out more sensitive to small fluctuations while climbing stairs. However, due to dynamic effects, most of stair-climbing robots generally undergo large fluctuations while climbing stairs, which is the reason for mobile instability at high speed. It is reported that some mobile robots can show smooth movement against stairs with the help of many actuators as well as high control costs. In this research, we propose a transformable adaptive wheel which can climb not only various size of stairs and single step obstacles but also flat floors smoothly and stably even at high speed with minimum actuators and control methods. Currently, we are on the progress of establishing the theory of optimal transformation for various obstacles and designing an prototype to verify the transformable wheel concept.