Tilting Thrusters Underwater RoboT (TTURT)
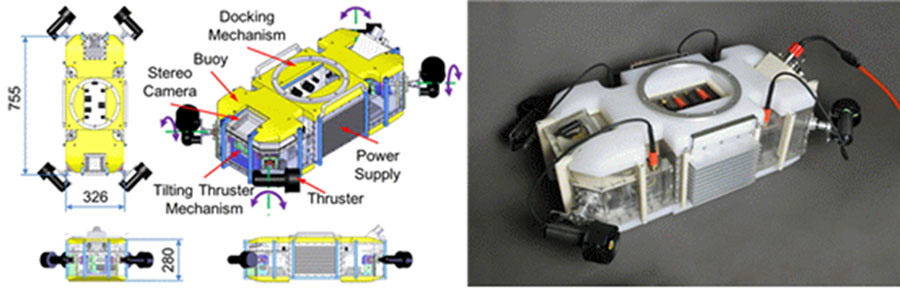
Tilting Thrusters Underwater Robot (TTURT) is underwater robotic platform that can generate six degree-of-freedom motion with four thrusters and two servo motors. By tilting two thruster at a time, TTURT can control six DOF motion with reduced number of actuators. TTURT is designed to perform various tasks by adding docking mechanism to connect many kinds of task modules. The design and appearance of the system is shown in the image below.
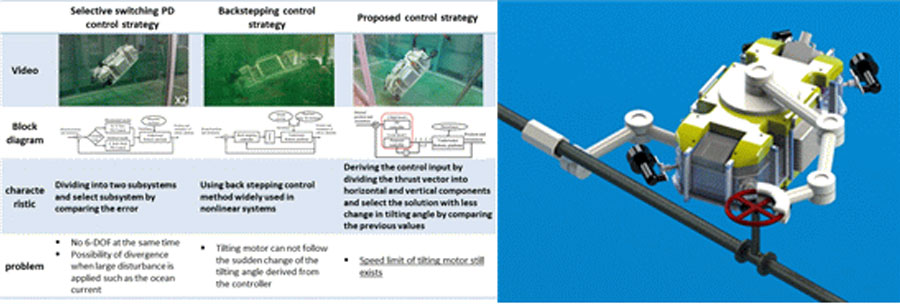
Our current research is focused on two subjects. The first one is improve control strategy of TTURT. Because of tilting mechanism of the system, we are currently using selective switching strategy. The method has possibility of divergence when large disturbance is applied. Therefore, we are going to apply new control method that can generate continuous tilting angle. The second one is attaching dual arm manipulator to the system and develop manipulation algorithm. We are developing manipulation algorithm that makes the platform and the manipulator cooperate with each other. Our research topics are summarized in images below.