Variable Topology Truss Platform (VTT platform)
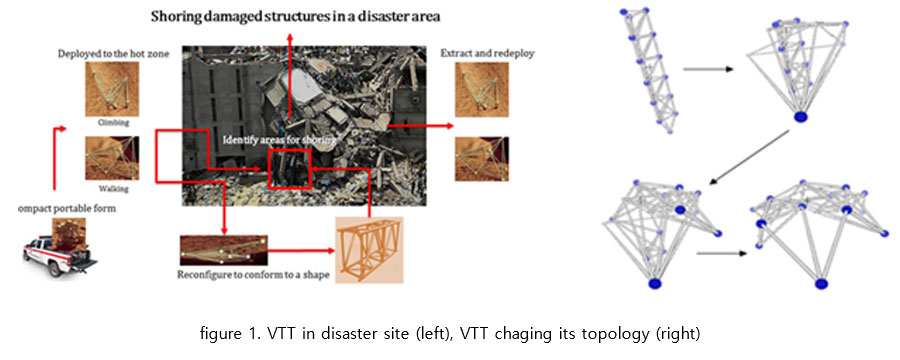
The variable topology truss (VTT) is a new type of truss type modular robot which can change its topology as well as its geometry. Due to its self-reconfiguration feature, VTT is useful to reach disaster site by changing its topology to optimal shape. And also it can shore vulnerable structure by changing its topology to shoring form.
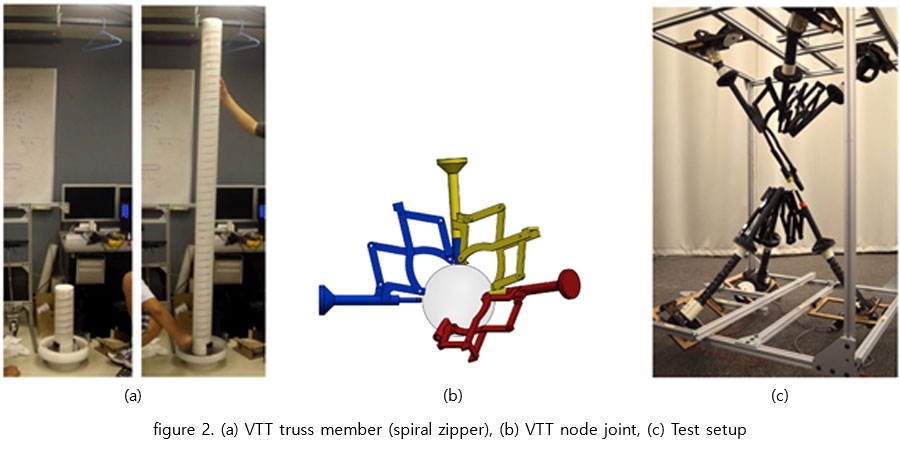
VTT mainly compose of truss members and nodes. For truss members, novel linear actuator, spiral zipper was developed to achieve high extension ratio with high strength. For nodes, spherical joint with six-bar linkage was developed. For reconfiguration it is designed to connect and disconnected truss members and have wide angle range.
Currently we are improving VTT hardware component and developing algorithms for self-reconfiguration and locomotion.
VTT mainly compose of truss members and nodes. For truss members, novel linear actuator, spiral zipper was developed to achieve high extension ratio with high strength. For nodes, spherical joint with six-bar linkage was developed. For reconfiguration it is designed to connect and disconnected truss members and have wide angle range.
Currently we are improving VTT hardware component and developing algorithms for self-reconfiguration and locomotion.