LiRoT : Lizard inspired Robot with operated Tail
A Lizard runs very fast at a constant speed, since its center of mass is relatively low comparing to other animals and its legs are sprawled on the side of the body. Owing to its physical condition, a lizard can run fast even on an environment with many obstacles.
Therefore we study about how a lizard’s running mechanism is working and apply it to running robot.
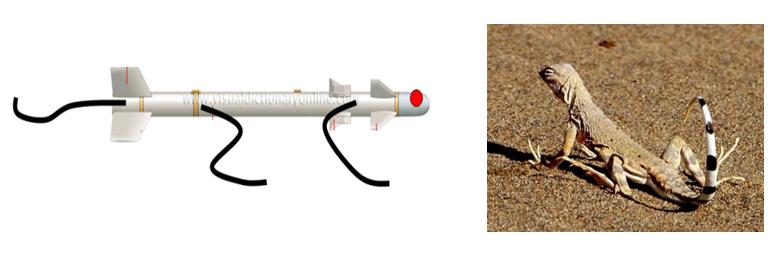
Fig.1 Concept of dragon lizard robot Fig.2 Zebra-tailed lizard
1. Previous work
The leg of a lizard saves the kinetic energy when it lands and uses the energy when it kicks the floor. Through this action and reaction, it saves the energy and can run at a constant speed. Therefore we study a leg mechanism of the lizard in effort to make a jumping leg.
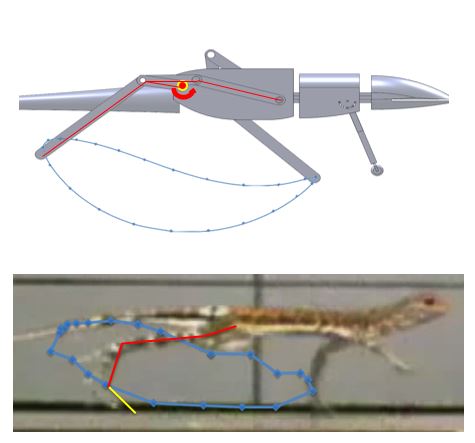
Fig.3 Optimization of rear foot trajectory of lizard using four bar linkage
We will make a running robot with four jumping legs. The robot will run with a dynamic gait (2-0-2-0) and control itself not to fall down during running.