Planar Type High-Speed Positioning Platform

Fig.1 A photograph of the positioning platform

Fig.2 Rotational capability of the positioning platform (0°, -90°, +90°)
| Table 1.Specifications of the positioning platform | |
| Overall size | 1,900 (L) × 1,220 (W) × 600 (H) mm |
| Moving platform size | 230 (L) × 230 (W) × 15 (H) mm |
| Dexterous workspace | 190 × 190 mm |
| Maximum velocityt | 150 m/min/span> |
| Maximum acceleration/span> | 2g (19,600 mm/sec2) |
| Number of axes | 4 (One actuation redundancy) |
| Stroke of each axis | 420 mm (-210 to 210 mm) |
| Link length | 285 mm |
| Actuators | Linear servo motors 1.5 kW (Mirae, Korea) |
The positioning platform is based on a new symmetric 2-PPR parallel mechanism, which has four actuators. Since it has three degrees of freedom and four actuators, it has basically one actuation redundancy that is essential to achieve high-degree dexterous motions. It is crucial to eliminate the actuator singularity in the workspace from the results of kinematic analyses. The dynamics analyses for the redundantly actuated parallel mechanism that include the inverse dynamics, vibration and resultant force analyses have been performed. They helped to develop a fastest positioning platform. As a result, the positioning platform satisfies target velocity and acceleration. In addition, the mutual fighting problem of the redundantly actuated parallel mechanism is solved by a new calibration method. After calibration, the positioning accuracy is under ±0.005 mm. The detailed results are shown in Table 2.
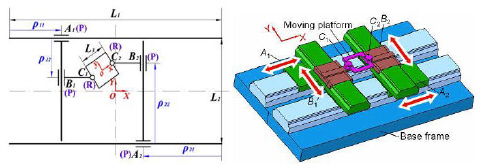
Fig.3 A schematic of the parallel mechanism and CAD model of the positioning platform
| Table 2. Positioning accuracy and the repeatability | ||
| Index | X-axis | Y-axis |
| Repeatability (Forward) (4σ) | 3.495 micro meter | 4.388 micro meter |
| Repeatability (Backward) (4σ) | 4.027 micro meter | 4.996 micro meter |
| Positioning accuracy | 4.261 micro meter | 7.698 micro meter |