Rough Terrain Hybrid Mobile Robot
The new mobile mechanism named “Rocker Pillar” was developed. The rocker pillar can overcome rough terrain with high stability by using the rocker bogie mechanism and active caterpillar mechanism on the robot.
A. rocker bogie mechanism
The Rocker-Pillar is composed of two caterpillars, four wheels, a pair of two passive joints and the main body. Its linkage mechanism is the same as the Rocker-Bogie mechanism, which makes every wheel contact the ground by use of passive joints without any actuators. When the robot is traveling at high speeds on rugged terrains, the caterpillar robot transmits much vibration to the robot body, and as a result, the main body is at risk of being overturned. The wheels and the linkage mechanism can reduce the risk of such an overturn. By using the Rocker-Bogie mechanism as a linkage system, the robot can stabilize its main body at it travels on rugged terrains.
B. active caterpillar mechanism
Instead of six wheels as in a Rocker-Bogie mechanism, the Rocker-Pillar has two caterpillars on the front and two wheels in the middle and two wheels at the back. The two caterpillars can change the angles with the linkage. Therefore, the Rocker-Pillar can overcome the rough terrains that the wheel mechanism cannot by using active caterpillars.
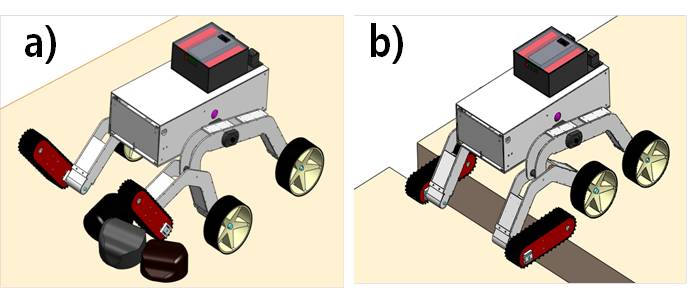
Depending on the shape of terrain, the Rocker-Pillar changes its mode to fit to the terrain. On rugged terrains that give rise to a large amount of vibration, the Rocker-Pillar lifts up its caterpillars upward and changes the mode to the Rocker-Bogie mode. The caterpillars contact the ground not on a surface but in a line and act as wheels; essentially, the Rocker-Pillar contacts the ground with six wheels like a Rocker-Bogie, and the linkage mechanism maintains its stability on rugged terrains. Also, the Rocker-Pillar can change its mode to the caterpillar mode so that it can overcome terrains that the wheel mechanism cannot. Holes are one of the terrains that previous models were not able to overcome. Wheels cannot pass over holes that are larger than the diameter of the wheels. However, by orienting the caterpillar tracks backward, the caterpillar and the wheel in the middle form a large caterpillar. By using the caterpillar mode, the Rocker-Pillar can overcome terrains that the wheel mechanism cannot overcome.

< Prototype #1 The Rocker pillar > < Prototype #2 The Rocker pillar2 >