Rough terrain mobile robot
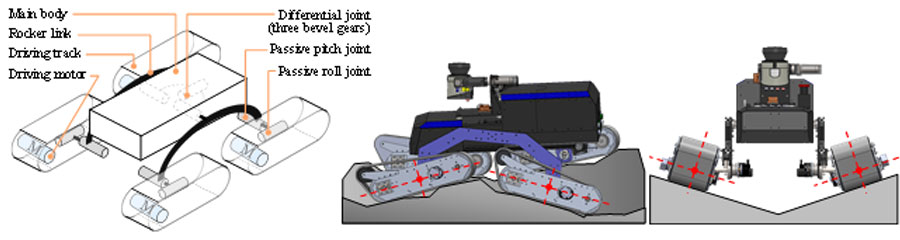
The TQTMR mechanism consists of a four driving tracks, two rocker links, and four 2-DOF pitch-roll passive joints, allowing the track posture to adapt freely to the ground curvature. This makes it possible to enhance the ground contact area of driving tracks without additional actuator, thereby reducing the traction loss and improving the position control performance.
The structural validity of the mechanism is confirmed by the dynamics simulation. Experimental validation of the rough terrain driving performance and autonomous leader following experiment is currently being done.

The structural validity of the mechanism is confirmed by the dynamics simulation. Experimental validation of the rough terrain driving performance and autonomous leader following experiment is currently being done.