Eclipse-1
The time-to market of new products becomes shorter, rapid machining becomes more important to gain competitiveness, where ‘rapid’ means the extreme reduction of the machining lead-time required to complete a part from the original workpiece. Rapid machining is especially required when manufacturing various part prototypes of the final product.
To reduce the machining lead-time to a minimum, setup changes should be avoided. For the existing conventional computerized numerical control machining centers, since the spindle axis is fixed, the setup of a prismatic workpiece must be changed more than once to process all five faces. So they are very inefficient for five-face machining with a single setup, a new machine tool structure must be created for rapid machining purposes.
Therefore we have invented a new parallel mechanism, Eclipse-I, which satisfies the prerequisites for rapid machining, which are the spindle axis be tilted from the vertical to the horizontal posture freely, and the spindle sweep the lateral surfaces of the workpiece over 360 degrees.
Fig.1 Prerequisites for rapid machining
We introduced this mechanism to ASME international conference, and won a best paper award.
Fig.2 The best paper award of ASME
The Eclipse-I mechanism has six kinematic degrees of freedom, and eight actuated joints. It consists of three PPRS serial subchains that move independently on a fixed circular guide: here, P, R, and S denote prismatic, revolute, and spherical joints, respectively. These eight active joints are three P joints along the circular guide, three P joints on the vertical columns and two R joints on two of the vertical columns.
To verify that the Eclipse-I is a viable architecture, a prototype machine was constructed. Its workspace is Φ100Χ100 and the maximum federate of the tool tip is 1.5 m/min. (Detailed in publications)
Fig.3 Eclipse-II One-man ride machine
To verify that the Eclipse-I is a viable architecture, a prototype machine was constructed. Its workspace is Φ100Χ100 and the maximum federate of the tool tip is 1.5 m/min. (Detailed in publications)
Once the performance of the Eclipse-I mechanism was verified, two real machines were designed. One is Eclipse-EMO that was presented at the international machine tool exhibition, EMO ’99, in Paris. The detailed are shown in publications.
Once the performance of the Eclipse-I mechanism was verified, two real machines were designed. One is Eclipse-EMO that was presented at the international machine tool exhibition, EMO ’99, in Paris. The detailed are shown in publications.
And the other is Eclipse-RP. The Eclipse-RP process is developed through manufacturing the sample model, the conceptual design. Eclipse-EMO machine is modified to Eclipse-RP. Eclipse-RP machine was exhibited on ‘RP&M 2001’ at Cincinnati USA on 15th-17th May 2001. The detailed are shown in publications
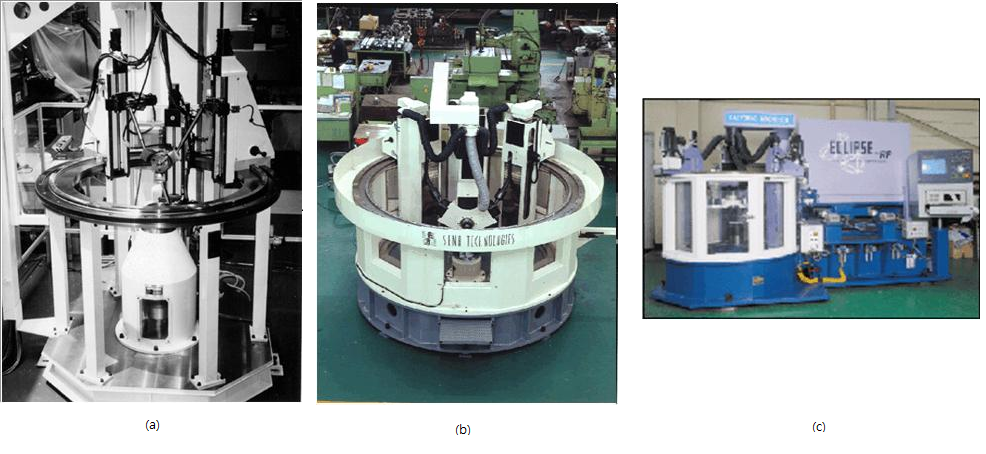
Fig.4 (a) Eclipse-I Prototype (b) Eclipse-EMO Machine (c) Eclipse-RP machine