Eclipse-2
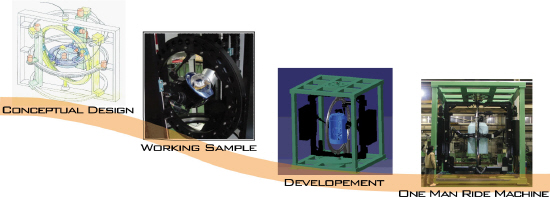
Fig.1 Process of development of Eclipse-II one-man ride machine
The Eclipse-II is a six degree-of-freedom parallel mechanism that consists of three PPRS serial sub-chains that move independently on a fixed circular guide. Here, P, R, and S denote prismatic, revolute, and spherical joints, respectively. And it is verified through numerous robotic analysis including kinematic analysis, singularity analysis eliminating all singularities, workspace analysis, dynamics, path planning algorithm and so on. (Detailed in publications)
To verify Eclipse-II mechanism, we have developed a working sample of this mechanism, and tested full 6-D.O.F motions using various dynamic images and the 'MS Flight Simulator 2002'. Its specifications are shown in publications.
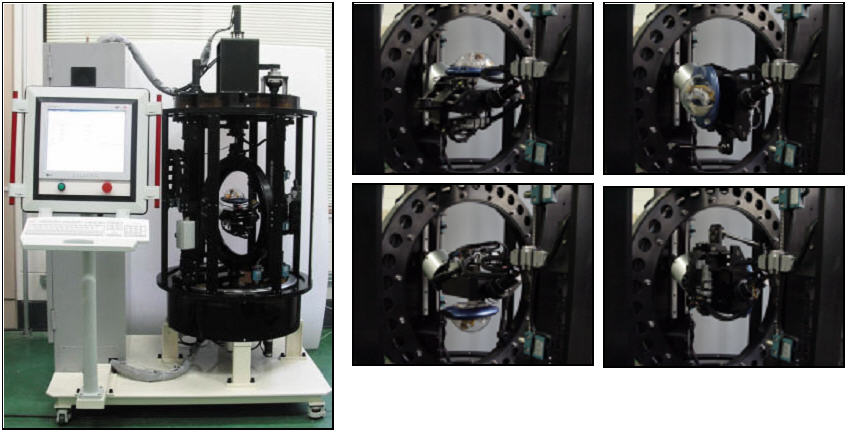
Fig.2 Working sample of the Eclipse-II
Based on the experience of the Eclipse-II working sample, we built an Eclipse-II one-man ride machine which is designed to let one person to ride and enjoy the virtual reality in Nov. 2005. To simulate any motion in the space, we are developing the on-line path planning algorithm, wash-out filters and so on. Moreover we are making several motion pathes synchronized to various dynamic images such as simulations of roller coasters, virtual reality amusement applications, space crafts, airplanes and jet fighters. Each sample movie clip is shown in the top of this page, in '1. Research Topic' catagory
| Table 1. Specification of the Eclipse-II One-man ride machine | |
| Machine Dimension (L x W x H) | 4200 mm x 4200 mm x 4700 mm |
| Machine Weight | 12000 kgf |
| Workspace Diameter | 236.6 mm |
| Workspace Height | 491.3 mm |
| Maximum Linear Speed | 36 m/min |
| Maximum Linear Acceleration | 4900 mm/sec2 |
| Maximum Angular Speed | 120 deg/sec |
| Maximum Angular Acceleration | 500 deg/sec2 |
| Number of Axes9 (AC-Servo motors) | 9 (AC-Servo motors) |