Micro Positioning Platform
The Micro Positioning Platform actuated by a dual servo system was developed in 2004. This machine is based on a micro parallel kinematic structure that can make 3D micro shapes.
| A. Parallel Mechanism | |
| The following figure shows the conceptual design of the developed parallel mechanism. End-effecter and actuator positions are triangular shaped. The first and second legs have identical chains, each consisting of a link that is connected to the end-effector by a universal joint and to the base plate by a passive revolute joint. The last leg has a different chain which consists of a planar four-bar parallelogram connected to the end-effector and the base plate by universal joints. The parallelogram shaped third leg restrains the motion of the end-effector, so that the end-effector could only do x- and y- translation and rotation about the x- axis. | 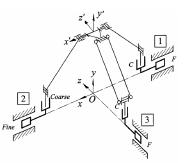 |
| | |
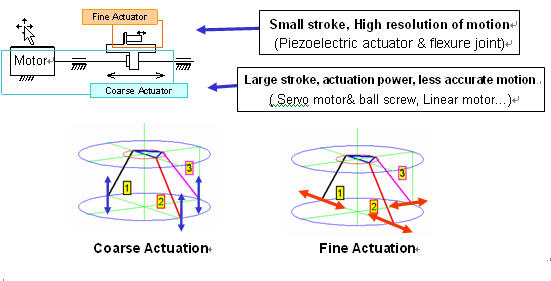
| B. Dual Servo System | |
| A dual stage system has an advantage of having alarge workspace while still providing a high resolution. By using a dual stage system, we also can increase dynamic performances such as settling time or overshoot. For the vertical type we've selected a coarse actuator combination and for the horizontal type a fine actuator combination. Vertical coarse actuation was selected to increase tilting capability and horizontal fine actuation was selected to get higher resolution | |
 | |
| | |
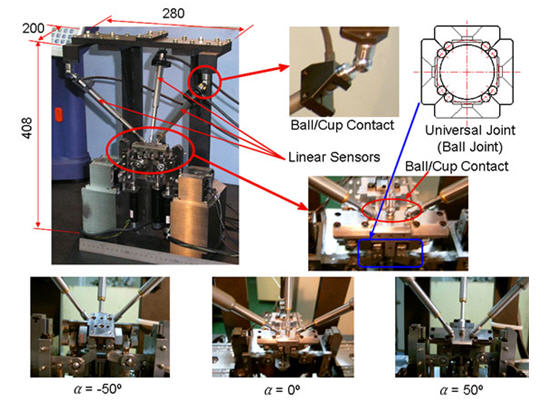
| C. Position/Orientation Sening Part | |
| In order to obtain high accuracy, a sensing part for the system to get feedback of the position and orientation of end-effector is necessary. The feedback sensor data is used to control the platform accurately. We developed a sensing system by using 3 linear sensors. It is able to measure the 3 d.o.f. of the platform motion. |  |